Engineering Services, Modeling, Simulation, Analysis and Custom Software Development
Robotics and Autonomy
On Land, in Air and at Sea, including Underwater, VxSIM supports all domains
Software and Simulation Development
Interface with your protocols, custom scenes, models and scenarios
Ocean and Surf Zone Physics Modeling
Underwater, velocities, pressures, sub-surface waves, thermals, etc.
Engineering Services, Modeling, Simulation, Analysis and Custom Software Development
Dynamic Dimension Technologies' knowledgeable staff can support you with your Digital Twin Development and your Engineering Services, Design, Analyze and Testing needs.
Software Programming :
C++, C, Java, Python, Fortran, etc., on Windows and Linux platforms
Engineering Design and Analysis :
CAD, CAE with CFD, LES, FEA, MBD, DES, SPH
Digital Twin :
Physics-based Models with VxSIM simulation
Products & Services
USMC Amphibious Driver Trainer System Delivery
Dynamic Dimension Technologies, LLC
Dynamic Dimension Technologies is proud to be teamed with LSI and BAE Systems to develop and deliver the prototype Surf Zone Driver Trainer System.
DDT's role on the team was to add our real physics models for the Ocean, Surf Zone and Vehicle Dynamics. Integrating our real physics models brings a monumental level of realism to the VR world.
Training with realistic vehicle responses on land, ocean and especially in the surf zone, makes all the difference with mission preparedness.
DDT's role on the team was to add our real physics models for the Ocean, Surf Zone and Vehicle Dynamics. Integrating our real physics models brings a monumental level of realism to the VR world.
VxSIM
Dynamic Dimension Technologies, LLC
VxSIMTM is a novel multi-tier, open architecture visualization and simulation framework with
integrated cyber/physical features. It is available to run stand alone as a Modeling and Simulation tool for product design, engineering analysis, development, systems-in-the-loop testing, AI testing and much more, or as a plug-in to game engines such as Unity.
The tool suite includes:
Scene Builder – operator’s interface for selecting and configuring the simulation and scenario content
Stealth Viewer – client provides a non-interacting observer view of the simulation.
Scene Runner – server provides network communication infrastructure for receiving/sending data with client applications, agent and plugins.
Scene Controller – provides exercise initialization, event synchronization, simulation state control, time management and orchestration. This application can be run from a command line to support un-attended batch and Monte Carlo simulations. Supports real-time and non-real-time simulation for mixed fidelity analyses.
Controller & Run-time Data Viewer
– Interface for vehicle model for remote control of vehicle and viewing internal dynamic state data, parameters and settings
– Can be added to any agent
Debug viewers – support sensor model verification and validation.
SimNetData – data recording, scenario replay, analytics, metrics gathering, etc.
Various sensor models – Lidar, depth finder, GPS, EO, etc.
Vehicle Dynamic – integrates hydrodynamics and terramechanics with physics solver for accurate analysis in surf zone.
Wave Models – Surf zone wave models based on bathymetry, underwater obstructions, objects, vegetation, reef and wind conditions.
Applications have included:
integrated cyber/physical features. It is available to run stand alone as a Modeling and Simulation tool for product design, engineering analysis, development, systems-in-the-loop testing, AI testing and much more, or as a plug-in to game engines such as Unity.
The tool suite includes:
Scene Builder – operator’s interface for selecting and configuring the simulation and scenario content
Stealth Viewer – client provides a non-interacting observer view of the simulation.
Scene Runner – server provides network communication infrastructure for receiving/sending data with client applications, agent and plugins.
Scene Controller – provides exercise initialization, event synchronization, simulation state control, time management and orchestration. This application can be run from a command line to support un-attended batch and Monte Carlo simulations. Supports real-time and non-real-time simulation for mixed fidelity analyses.
Controller & Run-time Data Viewer
– Interface for vehicle model for remote control of vehicle and viewing internal dynamic state data, parameters and settings
– Can be added to any agent
Debug viewers – support sensor model verification and validation.
SimNetData – data recording, scenario replay, analytics, metrics gathering, etc.
Various sensor models – Lidar, depth finder, GPS, EO, etc.
Vehicle Dynamic – integrates hydrodynamics and terramechanics with physics solver for accurate analysis in surf zone.
Wave Models – Surf zone wave models based on bathymetry, underwater obstructions, objects, vegetation, reef and wind conditions.
Applications have included:
- – Digital Twin development
- – Amphibious Driver Trainer Systems
- – Autonomous Navigation Modeling and Simulation in the loop for development and testing throughout the full autonomy stack
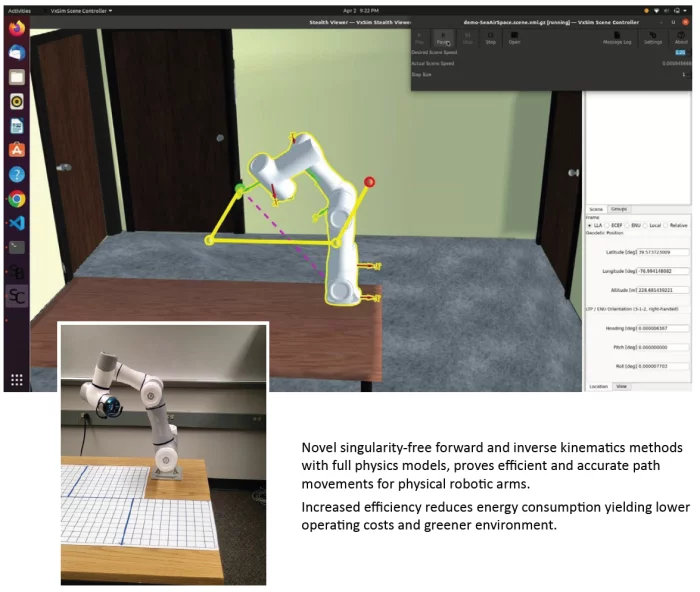
- – Robotic Arm digital twin
- – Physics modeling
- – Distributed Simulation and supports HLA and DIS
- – ROS, ROS-2, TCP, HTMLsockets and other communications protocols
- – Python Scripting
- – Blending Live Sensors and Synthetic scenes, Mixed Reality for Virtual/Physical Sandbox
- – And much, much more.
Unmanned Autonomy
Dynamic Dimension Technologies, LLC
Unmanned Autonomy showcases VxSIM, Dynamic Dimension Technologies’ next-generation digital twin environment for developing and validating advanced autonomous behaviors in maritime systems. Designed to accelerate AUKUS and Indo-Pacific innovation, VxSIM enables defense and industry teams to simulate, test, and refine autonomy before field deployment—reducing risk, cost, and time to readiness.
The system integrates real-time physics-based boat dynamics, navigation stacks, and mission logic across distributed computers to replicate complex maritime conditions and communications constraints. As shown, VxSIM synchronizes remote vessel dynamics with local autonomy planning, allowing collaborative testing of unmanned surface and subsurface vehicles (USVs/UUVs) under dynamic ocean environments.
By supporting live-virtual-constructive experimentation, VxSIM provides a unified platform for human-machine teaming, evidential reasoning, and multi-vehicle coordination—enabling coalition partners to validate AI-driven control algorithms, adaptive routing, and mission resilience. Its open-architecture design supports integration with ROS/ROS2, autonomy toolchains, and national simulation frameworks.
Through VxSIM, partners across the AUKUS alliance and Indo-Pacific region gain a sovereign capability to safely advance next-generation autonomy, enhance maritime interoperability, and strengthen defense collaboration through digital twin–driven experimentation and validation.
The system integrates real-time physics-based boat dynamics, navigation stacks, and mission logic across distributed computers to replicate complex maritime conditions and communications constraints. As shown, VxSIM synchronizes remote vessel dynamics with local autonomy planning, allowing collaborative testing of unmanned surface and subsurface vehicles (USVs/UUVs) under dynamic ocean environments.
By supporting live-virtual-constructive experimentation, VxSIM provides a unified platform for human-machine teaming, evidential reasoning, and multi-vehicle coordination—enabling coalition partners to validate AI-driven control algorithms, adaptive routing, and mission resilience. Its open-architecture design supports integration with ROS/ROS2, autonomy toolchains, and national simulation frameworks.
Through VxSIM, partners across the AUKUS alliance and Indo-Pacific region gain a sovereign capability to safely advance next-generation autonomy, enhance maritime interoperability, and strengthen defense collaboration through digital twin–driven experimentation and validation.
People
Description
Our senior staff has decades of combined experience (dating back to late 1980's) in software design and development, model verification and validation, engineering analysis, test and evaluation support. Starting from the early days with virtual prototyping supporting ship designs, motion platform ship bridge training systems, shipboard crane training systems, watercraft launch and recovery systems, embedded software, and VR headset submarine command tower navigation trainer with first voice recognition controls. Combining expertise with our next generation developers, engineers and researchers, we have breadth and depth to help solve your problems and optimize solutions.
Example solutions inclusive with:
Example solutions inclusive with:
- - Software development incorporating multi-fidelity Physics-based modeling and numerical methods
- - Real-time simulation with optimization including multi-threaded, multi-processor and distributed processing
- - Systems, Software and Hardware-in-the-loop testing with multiple interfaces or custom protocols
- - Virtual, Mixed and Augmented reality
- - Training Systems
- - Model-Based Systems Engineering and SysML
- - Digitization, Scanning, Processing and VR World Creation
